#include <quaternion.hpp>
template<typename T>
class std::math::quaternion< T >
◆ self_type
◆ value_type
◆ quaternion() [1/5]
69 :
s(1.0f),
v(vector3<value_type>(0.0f)) {}
vector3< value_type > v
Definition: quaternion.hpp:59
float s
Definition: quaternion.hpp:60
◆ quaternion() [2/5]
vector3< value_type > v
Definition: quaternion.hpp:59
float s
Definition: quaternion.hpp:60
◆ quaternion() [3/5]
322 s = cos_z_2*cos_y_2*cos_x_2 + sin_z_2*sin_y_2*sin_x_2;
323 v.
x = cos_z_2*cos_y_2*sin_x_2 - sin_z_2*sin_y_2*cos_x_2;
324 v.
y = cos_z_2*sin_y_2*cos_x_2 + sin_z_2*cos_y_2*sin_x_2;
325 v.
z = sin_z_2*cos_y_2*cos_x_2 - cos_z_2*sin_y_2*sin_x_2;
value_type z
Definition: vector3.hpp:61
vector3< value_type > v
Definition: quaternion.hpp:59
value_type y
Definition: vector3.hpp:60
float s
Definition: quaternion.hpp:60
value_type x
Definition: vector3.hpp:59
T value_type
Definition: quaternion.hpp:52
◆ quaternion() [4/5]
72 :
s(fs),
v(vector3<value_type>(x,y,z)) {}
vector3< value_type > v
Definition: quaternion.hpp:59
float s
Definition: quaternion.hpp:60
◆ quaternion() [5/5]
73 :
s(pfs[0]),
v(vector3<value_type>(pfs[1],pfs[2],pfs[3])) {}
vector3< value_type > v
Definition: quaternion.hpp:59
float s
Definition: quaternion.hpp:60
◆ operator const T *()
76 {
return (
float*)
qu; }
float qu[4]
Definition: quaternion.hpp:63
◆ operator T*()
float qu[4]
Definition: quaternion.hpp:63
◆ operator*=() [1/2]
85 s = ((
s * b.s) - (
v.
x * b.v.x) - (
v.
y * b.v.z) - (
v.
z * b.v.z));
86 v.
x = ((
s * b.v.x) + (
v.
x * b.s) + (
v.
y * b.v.y) - (
v.
z * b.v.y));
87 v.
y = ((
s * b.v.y) - (
v.
x * b.v.z) + (
v.
y * b.s) + (
v.
z * b.v.x));
88 v.
z = ((
s * b.v.z) + (
v.
x * b.v.y) - (
v.
y * b.v.x) + (
v.
z * b.s));
value_type z
Definition: vector3.hpp:61
vector3< value_type > v
Definition: quaternion.hpp:59
value_type y
Definition: vector3.hpp:60
float s
Definition: quaternion.hpp:60
value_type x
Definition: vector3.hpp:59
◆ operator*=() [2/2]
92 {
s *= f;
v.
x *= f;
v.
y *= f;
v.
z *= f;
return *
this; }
value_type z
Definition: vector3.hpp:61
vector3< value_type > v
Definition: quaternion.hpp:59
value_type y
Definition: vector3.hpp:60
float s
Definition: quaternion.hpp:60
value_type x
Definition: vector3.hpp:59
◆ operator+=()
81 {
v += q.v;
s += q.s;
return *
this; }
vector3< value_type > v
Definition: quaternion.hpp:59
float s
Definition: quaternion.hpp:60
◆ operator-=()
83 {
v -= q.v;
s -= q.s;
return *
this; }
vector3< value_type > v
Definition: quaternion.hpp:59
float s
Definition: quaternion.hpp:60
◆ operator/=() [1/2]
329 (* this) *=
invert(q);
return *
this;
matrix4x4< T > invert(const matrix4x4< T > &mat)
Definition: matrix4x4.hpp:490
◆ operator/=() [2/2]
95 {
s /= f;
v.
x /= f;
v.
y /= f;
v.
z /= f;
return *
this; }
value_type z
Definition: vector3.hpp:61
vector3< value_type > v
Definition: quaternion.hpp:59
value_type y
Definition: vector3.hpp:60
float s
Definition: quaternion.hpp:60
value_type x
Definition: vector3.hpp:59
◆ operator=()
79 {
v = q.v;
s = q.s;
return *
this; }
vector3< value_type > v
Definition: quaternion.hpp:59
float s
Definition: quaternion.hpp:60
◆ to_string()
size_t frmstring(basic_string< E, TAllocator, TStorage > &dest, const char *format, va_list arg)
Definition: string.hpp:99
vector4< value_type > vec
Definition: quaternion.hpp:62
std::basic_string< E, TAllocator, TStorage > to_string()
Definition: vector4.hpp:97
◆ @20
◆ qu
◆ vec
Die Dokumentation für diese Klasse wurde erzeugt aufgrund der Datei:

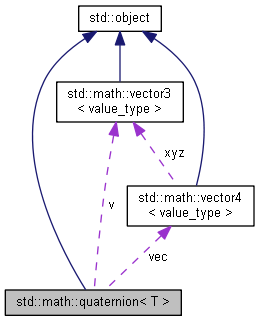
 Klassendiagramm für std::math::quaternion< T >:
Klassendiagramm für std::math::quaternion< T >: 1.8.13
1.8.13